Jaki jest stymulujący efekt prądów pulsacyjnych? Impulsy elektryczne i ich parametry
Typowym przykładem impulsów prostokątnych są pierwotne sygnały telegraficzne i dane, zwane także impulsami. DC. Przybierają postać sekwencji dwu- lub jednobiegunowych prostokątnych impulsów (ryc. 6.1, a).
Znajdźmy widmo okresowej sekwencji impulsów jednobiegunowych o okresie i amplitudzie UQ. Taki ciąg można przedstawić w postaci szeregu Fouriera:

gdzie jest częstotliwością powtarzania kołowego lub pierwszą harmoniczną (składnikiem widmowym) sygnału

Ryż. 6.1 Sekwencja impulsów (a) i jej widmo (b)
Współczynniki wyznaczają tzw. widmo amplitudowe i widmo fazowe. Naraz
![]()
gdzie jest cyklem pracy sekwencji impulsów. Składową stałą lub średnią wartością sygnału w okresie. Widmo amplitudowe dla przypadku przedstawiono na rys.
Widmo okresowej sekwencji jednobiegunowych impulsów zawiera oprócz składowej stałej składowe o częstotliwościach itp. Różnica między tymi składowymi widmowymi (Wraz ze wzrostem T maleje, podczas gdy same składowe również zmniejszają amplitudę. Przy sygnale staje się nieokresowe, a widmo staje się ciągłe Zamiast pojęcia widma amplitudowego wprowadza się pojęcie gęstości widmowej jako stosunek „amplitudy składowej widmowej” do nieskończenie małego pasma częstotliwości i oblicza się go. całka Fouriera:

gdzie jest gęstość widmowa amplitud; - widmo fazowe.
Wiedząc to, można znaleźć za pomocą odwrotnej transformaty Fouriera:
Gęstość widmowa amplitud pojedynczego prostokątnego impulsu, z dokładnością do współczynnika, jest przedstawiona linią przerywaną na ryc.
Widmo okresowego ciągu impulsów i pojedynczego impulsu zawiera składowe o częstotliwości od 0 do nieskończoności, czyli jest nieskończone. Jeśli kanałem komunikacyjnym, który transmituje zawsze tylko ograniczone widmo, jest przesyłana sekwencja prostokątnych impulsów, wówczas zmienia się kształt sygnału na wyjściu kanału. Kształt sygnału można wyznaczyć za pomocą odwrotnej transformaty Fouriera (6.6).
W praktyce przez szerokość widma sygnału rozumie się zwykle obszar częstotliwości, w którym koncentruje się główna energia sygnału. W tym przypadku wprowadzono pojęcie efektywnej szerokości widma sygnału. Na ryc. - jest to zakres częstotliwości od 0 do, w którym koncentruje się około 90% energii sygnału. Oznacza to, że im krótszy czas trwania impulsu (im większa prędkość telegraficzna), tym szersze widmo. W szczególności nieskończenie krótki impuls ma nieskończenie rozszerzone widmo o jednakowej gęstości. Zatem transmisja przy wyższych prędkościach wymaga kanałów o szerszej przepustowości.
Dla danego czasu trwania pojedynczego elementu na widmo transmitowanego sygnału wpływają dwa czynniki. Jednym z nich jest kształt impulsu, który należy odpowiednio dobrać, aby uzyskać dobre (zwarte) widmo sygnału. Kolejnym czynnikiem jest charakter transmitowanej sekwencji cyfrowej, tj. widmo zależy od charakterystyk statystycznych transmitowanej sekwencji, a widmo można zmieniać poprzez jego rekodowanie.
Aby ocenić zniekształcenie impulsów prądu stałego spowodowane obcięciem widma, należy rozważyć przepuszczenie impulsu przez idealny filtr dolnoprzepustowy (LPF). Jako efektu wejściowego użyjemy funkcji krokowej
przedstawione graficznie na ryc. 6.2. Wybór takiego efektu wejściowego wynika z faktu, że po pierwsze jego zastosowanie upraszcza obliczenia matematyczne, a po drugie pojedynczy prostokątny impuls o skończonym czasie trwania można przedstawić jako sekwencję dwóch pojedynczych skoków napięcia znak przeciwny, przesunięty w czasie o wielkość równą czasowi trwania impulsu (rys. 6.3).
Ryż. 6.2 Funkcja krokowa
Ryż. 6.3. Reprezentacja pojedynczego impulsu

Ryż. 6.4. Charakterystyka idealnego filtra dolnoprzepustowego
I wreszcie, znając charakterystykę procesu w stanie ustalonym pod wpływem pojedynczego wstrząsu, korzystając z twierdzenia o splocie, można znaleźć proces w stanie ustalonym dla dowolnej formy wpływu.
Niech charakterystyki amplitudy i częstotliwości fazowej wejścia idealnego filtra dolnoprzepustowego z częstotliwością odcięcia mają postać (ryc. 6.4):

gdzie jest grupowym czasem przejścia filtra, w chwili podania sygnału (6.7), który można przedstawić w postaci

Aby otrzymać sygnał na wyjściu filtra dolnoprzepustowego, mnożymy wszystkie składowe sygnału wejściowego przez moduł współczynnika transmisji filtra i odejmujemy przesunięcie fazowe przy każdej częstotliwości od argumentu sinusa:
Podstawiając wartość współczynnika transmisji z (6.8) do (6.9) otrzymujemy
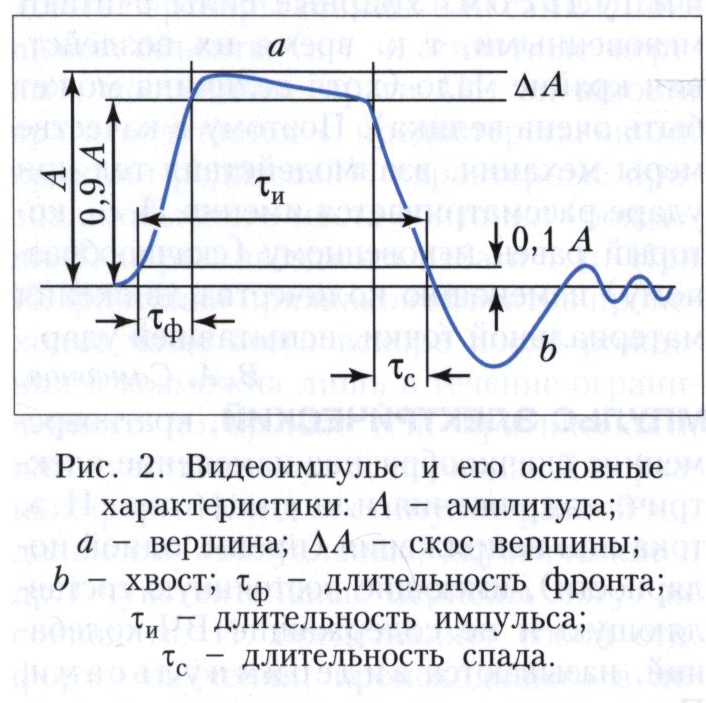
IMPULS ELEKTRYCZNY, krótkotrwała, nagła zmiana napięcie elektryczne lub aktualny. Impuls prądu lub napięcia elektrycznego (głównie o tej samej polaryzacji), mający stałą składową i niezawierający oscylacji HF, nazywany jest impulsami wideo. W zależności od charakteru zmian w czasie, impulsy wideo dzielą się na kształty prostokątne, piłokształtne, trapezowe, dzwonowe, wykładnicze i inne (ryc. 1, a-d). Prawdziwy impuls wideo może mieć dość złożony kształt(rys. 2), który charakteryzuje się amplitudą A, czasem trwania τ I (liczonym na ustalonym poziomie, np. 0,1 A lub 0,5 A), czasem trwania frontu τ F i spadkiem τ C (liczonym pomiędzy poziomami 0,1 A i 0,9 A), skos końcówki ΔA (wyrażony jako procent A). Najpowszechniej stosowane są prostokątne impulsy wideo, na podstawie których powstają sygnały synchronizujące, sterujące i informacyjne w technice komputerowej, radarowej, telewizyjnej, cyfrowych systemach przesyłania i przetwarzania informacji itp. Wykorzystywane są impulsy wideo piłokształtne i wykładnicze, na przykład: w systemach skanujących dla telewizorów, wyświetlaczy radarowych, oscyloskopów, a także w tworzeniu złożonych sygnałów radarowych z modulacją częstotliwości wewnątrzimpulsowej. Czas trwania impulsów wideo waha się od ułamków sekundy do dziesiątych części nanosekundy.
Oprócz pojedynczych i nieregularnych przepływów impulsów elektrycznych w czasie, w praktyce stosuje się ciągi okresowe, które dodatkowo charakteryzują się okresem T lub częstotliwością powtarzania f=T -1 . Ważny parametr okresową sekwencją impulsów elektrycznych jest cykl pracy (stosunek okresu powtarzania impulsów do czasu ich trwania). Zgodnie z rozkładem częstotliwości impulsy elektryczne charakteryzują się widmem, które otrzymuje się w wyniku rozwinięcia funkcji czasu wyrażającej impuls elektryczny w szereg Fouriera (dla okresowej sekwencji identycznych impulsów) lub całkę Fouriera (dla pojedyncze impulsy).
Impulsy elektryczne, które są ograniczonymi w czasie (przerywanymi) oscylacjami HF lub mikrofalowymi, których otoczka ma kształt impulsu wideo (ryc. 1, e), nazywane są impulsami radiowymi. Czas trwania i amplituda impulsów radiowych odpowiadają parametrom modulujących impulsów wideo; dodatkowym parametrem jest częstotliwość nośna. Impulsy radiowe wykorzystywane są głównie w urządzeniach radiowych i komunikacyjnych; ich czas trwania waha się od ułamków sekundy do kilku nanosekund.
Dosł.: Erofeev Yu. Urządzenia impulsowe. wydanie 3. M., 1989; Brammer Yu. A., Pashchuk I. N. Technologia impulsowa. M., 2005.
Impuls elektryczny krótkotrwała zmiana napięcia lub prądu elektrycznego. Przez krótki rozumie się okres czasu porównywalny z czasem trwania procesy przejściowe w obwodach elektrycznych . Tj. podzielony na impulsy wysokiego napięcia, impulsy prądu wielka siła, impulsy wideo i impulsy radiowe. Tj. wysokie napięcia są zwykle uzyskiwane przez rozładowywanie kondensatora do aktywnego obciążenia i mają aperiodyczny kształt. Wyładowania atmosferyczne mają zwykle ten sam kształt. Pojedynczy tj. podobny kształt z amplitudą kilku kv do kilku Mv z frontem fali 0,5-2 µsek i czas trwania 10-10 -2 µsek użyte w testach urządzenia elektryczne i sprzęt w technologii Wysokie napięcie. Wysokie udary prądowe mogą mieć kształt podobny do prądu elektrycznego. wysokie napięcie (patrz Technologia impulsowa wysokie napięcia).
Impulsy wideo nazywane są I. e. prąd lub napięcie (głównie o tej samej polaryzacji) o składowej stałej różnej od zera. Istnieją impulsy wideo prostokątne, piłokształtne, trapezowe, wykładnicze, w kształcie dzwonu i inne ( ryż. 1 , a-d). Charakterystyczne elementy decydujące o kształcie i parametrach ilościowych impulsu wideo ( ryż. 2 ) to amplituda A, czoło t f, czas trwania t oraz spadek t s i nachylenie wierzchołka (DA), zwykle wyrażane jako procent A. Okresowa sekwencja impulsów wideo charakteryzuje się częstotliwością powtarzania i czasem pracy cykl (stosunek okresu powtarzania do czasu trwania I.E.). Czas trwania impulsów wideo - z ułamków sek do dziesiątek niedz (10 -9 sek). Impulsy wideo są wykorzystywane w telewizji, technologii komputerowej, radarach, fizyce doświadczalnej, automatyce itp.
Impuls radiowy to przerywana oscylacja HF lub mikrofalowa. prąd elektryczny lub napięcie ( ryż. 1 , e), których amplituda i czas trwania zależą od parametrów drgań modulujących. Czas trwania i amplituda impulsów radiowych odpowiadają parametrom modulujących impulsów wideo; dodatkowy parametr - częstotliwość nośna. Impulsy radiowe wykorzystywane są głównie w technice radiowej i komunikacyjnej. Czas trwania impulsów radiowych waha się od ułamków sek Do niedz.
Oświetlony.: Itskhoki Ya. S., Urządzenia impulsowe, M., 1959; Podstawy technologii impulsowej, M., 1966; Brammer Yu. A., Pashchuk I. N., Technologia impulsowa, wyd. 2, M., 1968.
Wielka Encyklopedia Radziecka M.: „Encyklopedia radziecka”, 1969-1978
Pod impuls elektryczny rozumieć odchylenie napięcia lub prądu od pewnego stałego poziomu (w szczególności od zera), obserwowane przez czas krótszy lub porównywalny z czasem trwania procesów przejściowych w obwodzie.
Jak już wspomniano, przez proces przejściowy rozumie się każdą nagłą zmianę ustalonego reżimu w obwód elektryczny z powodu działania sygnałów zewnętrznych lub przełączania w samym obwodzie. Zatem proces przejściowy to proces przejścia obwodu elektrycznego z jednego stanu stacjonarnego do drugiego. Bez względu na to, jak krótki jest ten proces przejścia, zawsze jest on skończony w czasie. W przypadku obwodów, w których czas życia procesu przejściowego jest nieporównywalnie krótszy niż czas działania sygnału zewnętrznego (napięcia lub prądu), tryb pracy uważa się za ustalony, a sam sygnał zewnętrzny dla takiego obwodu nie jest impulsowy. Przykładem tego jest działanie przekaźnika elektromagnetycznego.
Kiedy czas trwania sygnałów napięciowych lub prądowych działających w obwodzie elektrycznym staje się współmierny do czasu trwania procesów ustanawiania, proces przejściowy ma taki wpływ silny wpływ na kształt i parametry tych sygnałów, tak aby nie można było ich zignorować. W tym przypadku w większości przypadków sygnał wpływający na obwód elektryczny pokrywa się z czasem życia procesu przejściowego (ryc. 1.4). Tryb pracy obwodu podczas działania takiego sygnału będzie niestacjonarny, a jego wpływ na obwód elektryczny będzie pulsacyjny.
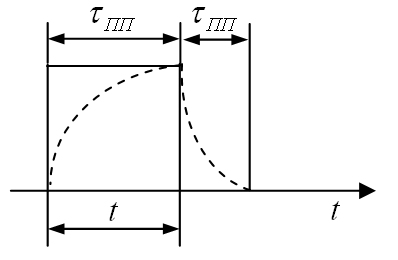
Ryc.1.4. Zależność między czasem trwania sygnału a czasem trwania
proces przejścia:
A) czas trwania procesu przejścia jest znacznie krótszy niż czas trwania
sygnał ( τ s<< t );
B) czas trwania procesu przejścia jest współmierny do czasu trwania
sygnał ( τ pp ≈ t ).
Wynika z tego, że pojęcie impulsu jest związane z parametrami konkretnego obwodu i że nie dla każdego obwodu sygnał można uznać za impulsowy.
Zatem, Impuls elektryczny dla danego obwodu to napięcie lub prąd działające przez okres czasu proporcjonalny do czasu trwania procesu nieustalonego w tym obwodzie. W tym przypadku zakłada się, że pomiędzy dwoma impulsami działającymi sekwencyjnie w obwodzie musi upłynąć wystarczający okres czasu, przekraczający czas trwania procesu ustanawiania. W przeciwnym razie zamiast impulsów pojawią się sygnały o skomplikowanych kształtach (ryc. 1.5).
Ryc.1.5. Sygnały elektryczne o skomplikowanych kształtach
Obecność odstępów czasowych nadaje sygnałowi impulsowemu charakterystyczną strukturę przerywaną. Pewna konwencja takich definicji polega na tym, że proces ustanawiania teoretycznie trwa w nieskończoność.
Mogą istnieć takie pośrednie przypadki, gdy procesy przejściowe w obwodach nie mają czasu, aby praktycznie zakończyć się od impulsu do impulsu, chociaż działające sygnały nadal nazywane są impulsowymi. W takich przypadkach powstają dodatkowe zniekształcenia kształtu impulsu, spowodowane nałożeniem procesu nieustalonego na początek kolejnego impulsu.
Istnieją dwa rodzaje impulsów: impulsy wideo I impulsy radiowe . Impulsy wideo są odbierane podczas komutowania (przełączania) obwodu prądu stałego. Impulsy takie nie zawierają oscylacji o wysokiej częstotliwości i mają składową stałą (wartość średnią) różną od zera.
Impulsy wideo zwykle wyróżniają się kształtem. Na ryc. 1.6. pokazane są najczęściej występujące impulsy wideo.

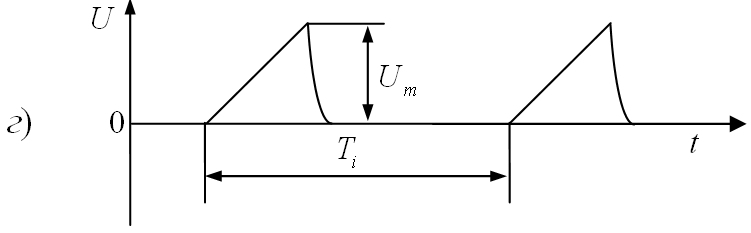
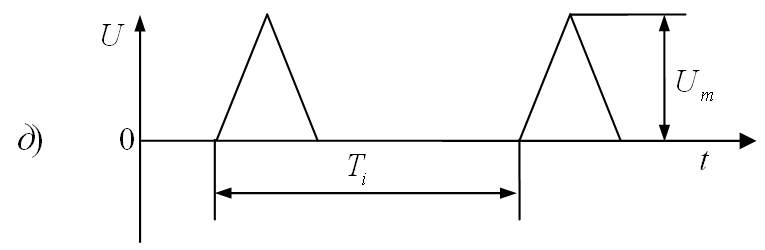

Ryż. 1.6. Kształty impulsów wideo:
A) prostokątny; B) trapezowy; V) spiczasty;
G) ząb piły; D) trójkątny; mi) heteropolarny.
Rozważmy główne parametry pojedynczego impulsu (ryc. 1.7).
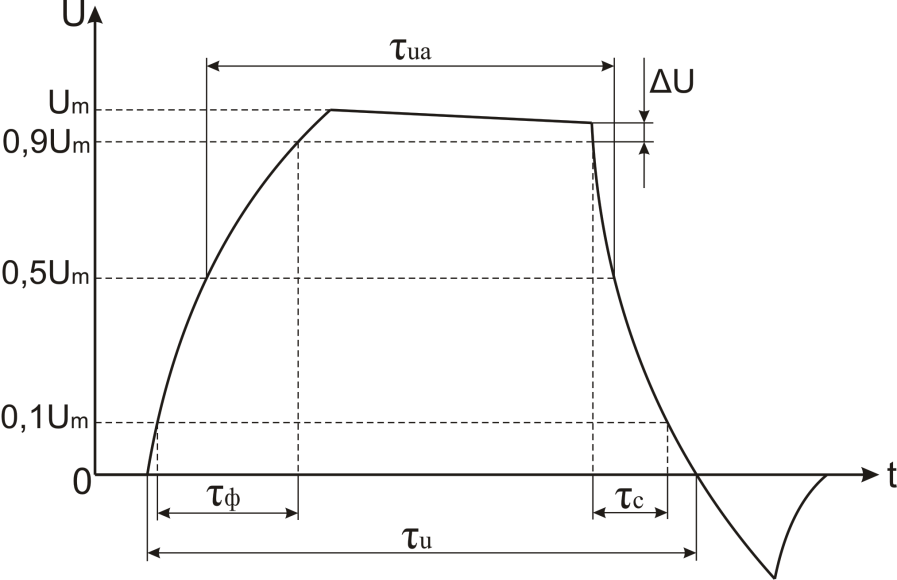
Ryż. 1.7. Parametry pojedynczego impulsu
Kształt impulsów i właściwości poszczególnych ich odcinków ocenia się ilościowo za pomocą następujących parametrów:
· Hmm – amplituda (wartość maksymalna) impulsu. Amplituda impulsu U m (ja m) wyrażone w woltach (amperach).
· τ i – czas trwania impulsu. Zazwyczaj przeprowadza się pomiary czasu trwania impulsów lub poszczególnych odcinków pewien poziom z ich bazy. Jeżeli nie jest to określone, czas trwania impulsu określa się na poziomie zerowym. Jednak najczęściej czas trwania impulsu określa się na poziomie 0,1U m Lub 0,5U m , licząc od podstawy. W tym drugim przypadku nazywany jest czasem trwania impulsu aktywny czas trwania i jest wyznaczony τ m.in . W razie potrzeby i w zależności od kształtu impulsów specjalnie określa się akceptowane wartości poziomów do pomiaru.
· τ f – czas trwania frontu, wyznaczony przez czas narastania impulsu od poziomu 0,1U m do poziomu 0,9U m .
· τ s – czas trwania odcięcia (zbocza opadającego), wyznaczony przez czas opadania impulsu od poziomu 0,9U m do poziomu 0,1U m . Kiedy mierzony jest czas narastania lub opadania 0,5U m , nazywa się to czasem trwania aktywności i oznacza się go przez dodanie indeksu "A" podobny do czasu trwania aktywnego impulsu. Zazwyczaj τ f I τ s wynosi kilka procent czasu trwania impulsu. Im mniej τ f I τ s w porównaniu do τ i , tym bardziej kształt impulsu zbliża się do prostokąta. Czasami zamiast tego τ f I τ s Fronty impulsowe charakteryzują się szybkością narastania (opadania). Ta ilość nazywa się stromość (S) przodu (cięcie) i wyrażane w woltach na sekundę (W/Z) lub kilowoltów na sekundę (kV/Z) . Dla impulsu kwadratowego
 ………………………………(1.14).
………………………………(1.14).
· Odcinek impulsu pomiędzy frontami nazywany jest płaską górą. Wykres 1.7 pokazuje płaski spadek (ΔU) .
· Moc impulsu. Energia W impuls w zależności od czasu jego trwania określa moc w impulsie:
 ………………………………(1.15).
………………………………(1.15).
Wyraża się go w watach (W) , kilowaty (kW) lub jednostki lobarskie
tsah wata.
Urządzenia impulsowe wykorzystują impulsy o czasie trwania od ułamków sekundy do nanosekund. (10 – 9 s) .
Charakterystyczne odcinki impulsu (ryc. 1.8), które decydują o jego kształcie,
Czy:
· przód (1 – 2);
· góra (2 – 3);
· cięcie (3 – 4), czasami nazywane krawędzią spływu;
· ogon (4 – 5).
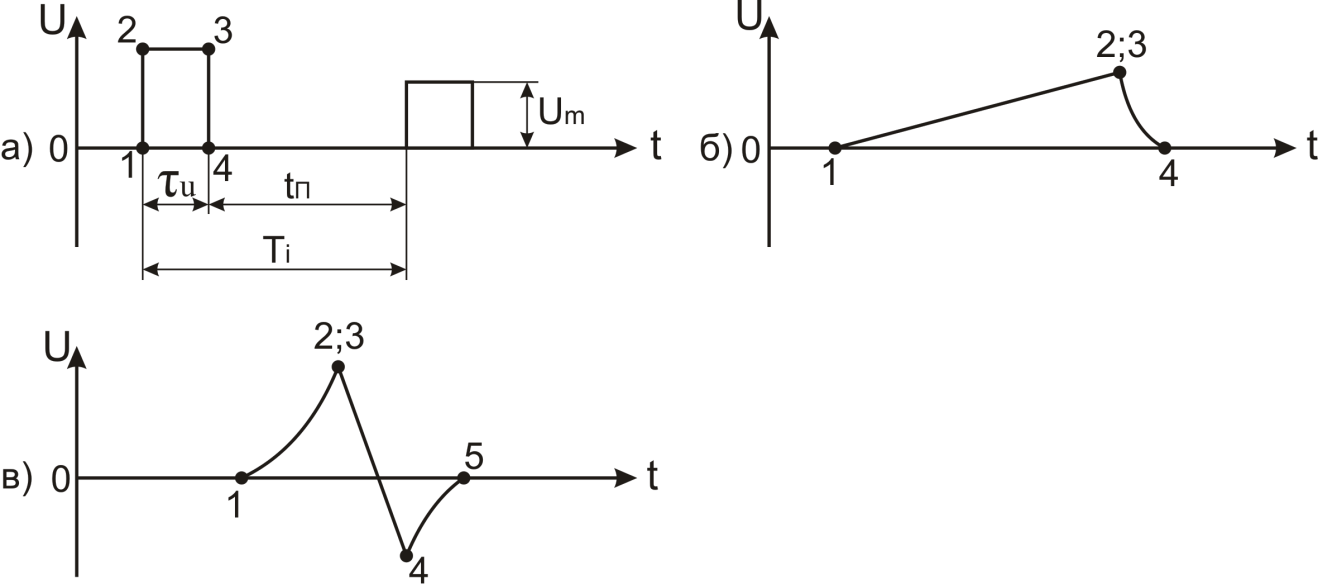
Ryc.1.8. Charakterystyczne odcinki impulsu
Może brakować niektórych odcinków impulsów o różnych kształtach. Należy pamiętać, że prawdziwe impulsy nie mają kształtu ściśle odpowiadającego nazwie. Istnieją impulsy o polaryzacji dodatniej i ujemnej, a także impulsy dwubiegunowe (wielobiegunowe).
(ryc. 1.6, mi).
Impulsy radiowe to impulsy oscylacji napięcia lub prądu o wysokiej częstotliwości, zwykle o kształcie sinusoidalnym. Impulsy radiowe nie mają składowej stałej. Impulsy radiowe uzyskuje się poprzez modulację amplitudy sinusoidalnych oscylacji o wysokiej częstotliwości. W tym przypadku modulacja amplitudy odbywa się zgodnie z prawem sterującego impulsu wideo. Kształty odpowiednich impulsów radiowych otrzymane za pomocą modulacji amplitudy pokazano na ryc. 1.9:
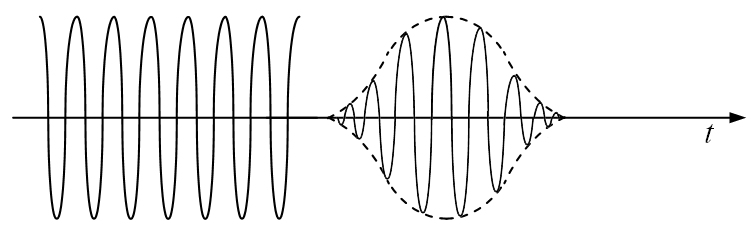
Ryc.1.9. Kształty impulsów radiowych
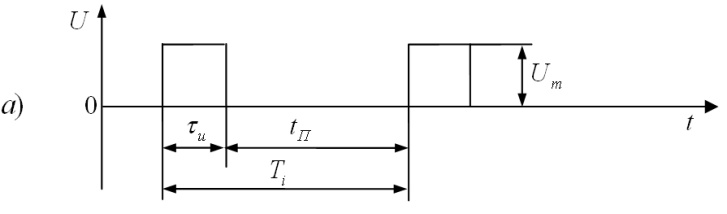
Nazywa się impulsy elektryczne następujące po sobie w równych odstępach czasu sekwencja okresowa (ryc. 1.10).
Ryc.1.10. Okresowa sekwencja impulsów
Okresową sekwencję impulsów charakteryzują następujące parametry:
· Okres nawrotów T ja – odstęp czasu pomiędzy początkiem dwóch sąsiednich impulsów jednobiegunowych. Wyraża się go w sekundach (Z) lub jednostki subsekundowe (ms; μs; ns). Odwrotność okresu powtarzania nazywana jest częstotliwością powtarzania impulsów. Określa liczbę impulsów w ciągu jednej sekundy i wyraża się ją w hercach (Hz) , kiloherc (kHz) itp.
 ……………………………….. (1.16)
……………………………….. (1.16)
· Cykl pracy sekwencji impulsów to stosunek okresu powtarzania do czasu trwania impulsu. Oznaczone literą Q :
 ………………… (1.17)
………………… (1.17)
Cykl pracy jest wielkością bezwymiarową, która może zmieniać się w bardzo szerokim zakresie, ponieważ czas trwania impulsów może być setki, a nawet tysiące razy krótszy niż okres impulsu lub odwrotnie, zajmować większość okresu.
Odwrotność cyklu pracy nazywa się cyklem pracy. Wielkość ta jest bezwymiarowa, mniejsza od jedności. Jest to oznaczone literą γ :
 …………………………(1.18)
…………………………(1.18)
Sekwencja impulsów z q = 2 zwany "meandry" . Ten ma
sekwencje  (ryc. 1.6, mi). Jeśli T i >> τ i
, to taki ciąg nazywamy radar.
(ryc. 1.6, mi). Jeśli T i >> τ i
, to taki ciąg nazywamy radar.
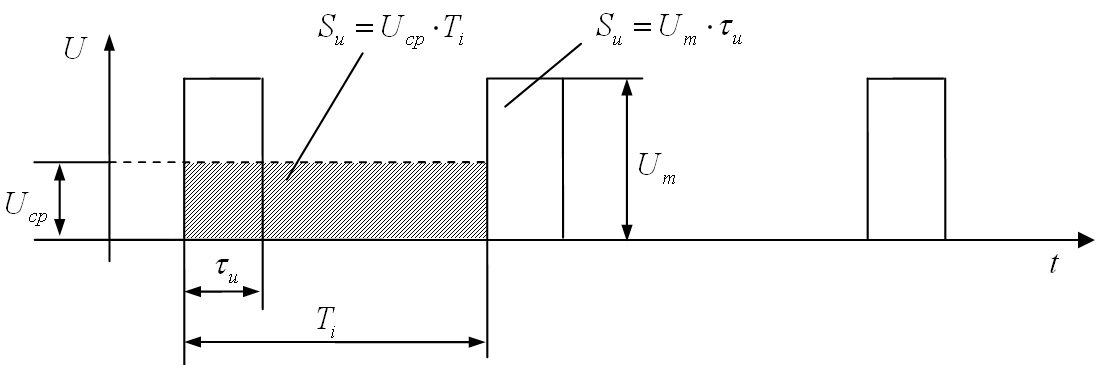
· Wartość średnia (składnik stała) oscylacji impulsu. Przy określaniu średniej wartości oscylacji impulsu w okresie U średnio (lub ja średnio) Impuls napięcia lub prądu rozkłada się równomiernie na cały okres, tak aby powierzchnia U av · T i była równa powierzchni tętna S i = U m · τ i (ryc. 1.10).
W przypadku impulsów o dowolnym kształcie wartość średnią określa się na podstawie wyrażenia
 ……………………(1.19),
……………………(1.19),
gdzie U(t) jest wyrażeniem analitycznym kształtu impulsu.
Dla okresowej sekwencji prostokątnych impulsów, dla których U(t) = U m , okres powtarzania T ja i czas trwania impulsu τ i , to wyrażenie po podstawieniu i przekształceniu przyjmuje postać:
 …………………….(1.20).
…………………….(1.20).
Z ryc. 1.10 to jasne S i = U m · τ i = U av · T i , z czego wynika:
 ……………(1.21),
……………(1.21),
Gdzie U 0 - zwany składnikiem stałym.
Zatem średnia wartość (składnik stały) napięcia (prądu) sekwencji prostokątnych impulsów Q razy mniejsza niż amplituda impulsu.
· Średnia moc sekwencji impulsów. Energia pulsu W , przypisany do okresu T ja , określa średnią moc impulsu
 …………………………….. (1.22).
…………………………….. (1.22).
Porównywanie wyrażeń R i I R śr , otrzymujemy
P ja · τ ja = P av · T ja ,
skąd wynika
 …………………(1.23)
…………………(1.23)
I  ……………………. (1.24),
……………………. (1.24),
te. średnia moc i moc na impuls różnią się Q raz.
Wynika z tego, że moc impulsu dostarczana przez generator może Q razy większa od średniej mocy generatora.
Zadania i ćwiczenia
1. Amplituda impulsu wynosi 11 kV, czas trwania impulsu wynosi 1 μs. Określ nachylenie czoła impulsu, jeśli przyjmiemy, że czas trwania frontu jest równy 20% czasu trwania impulsu.
2. Amplituda impulsów prostokątnych o częstotliwości powtarzania 1250 Hz i cyklu pracy 2300 wynosi 11 kV. Wyznacz nachylenie frontu i odcięcia, jeśli przyjmiemy, że czas trwania frontu i odcięcia jest równy 20% czasu trwania impulsu.
3. Wyznacz stałą czasową obwodu składającego się z kondensatora o pojemności 5000 pF i rezystancji czynnej 0,5 MΩ.
4. Wyznacz stałą czasową obwodu składającego się z indukcyjności 20 mH i rezystancji czynnej 5 kOhm.
5. Określ średnią moc radarowego urządzenia nadawczego, które ma następujące parametry: moc impulsu 800 kW; czas trwania impulsu sondy 3,2 μs; częstotliwość powtarzania impulsów sondujących wynosi 375 Hz.
6. Kondensator o pojemności 400 pF ładuje się ze źródła stałego napięcia 200 V przez rezystancję 0,5 MΩ. Określ napięcie na kondensatorze 600 μs po rozpoczęciu ładowania.
7. Źródło prądu stałego o napięciu 50 V podłącza się do obwodu składającego się z kondensatora o pojemności 10 pF i rezystancji 2 MΩ. Wyznaczamy prąd w chwili załączenia i 40 µs po włączeniu.
8. Kondensator naładowany do napięcia 300 V jest rozładowywany przez rezystancję 300 MΩ. Określ wielkość prądu rozładowania w czasie t = 3τ po rozpoczęciu wyładowania.
9. Ile czasu zajmie ładowanie kondensatora o pojemności 100 pF do napięcia 340 V, jeśli napięcie źródła wynosi 540 V, a rezystancja obwodu ładowania wynosi 100 kOhm?
10. Obwód o indukcyjności 10 mH i rezystancji 5 kOhm podłącza się do źródła napięcia stałego o napięciu 250 V. Wyznaczamy prąd płynący w obwodzie 4 μs po włączeniu.
Rozdział 2. Kształtowanie impulsu
Obwody liniowe i nieliniowe
W technologii impulsowej szeroko stosowane są obwody i urządzenia, które generują napięcia jednej formy z napięć innej. Takie problemy rozwiązuje się za pomocą elementów liniowych i nieliniowych.
Element, którego parametry (rezystancja, indukcyjność, pojemność) nie zależą od wielkości i kierunku prądów i przyłożonych napięć, nazywa się liniowym. Obwody zawierające elementy liniowe nazywane są
liniowy.
Właściwości obwodów liniowych:
· Charakterystyka prądowo-napięciowa(VC) obwodu liniowego jest linią prostą, tj. wielkości prądów i napięć będą ze sobą powiązane równaniami liniowymi o stałych współczynnikach. Przykładem charakterystyki prądowo-napięciowej tego typu jest prawo Ohma:  .
.
· Do obliczeń (analizy) i syntezy obwodów liniowych stosujemy zasadę superpozycji (nakładki). Znaczenie zasady superpozycji jest następujące: jeśli zostanie zastosowana do wejścia obwodu liniowego napięcie sinusoidalne, wówczas napięcie na którymkolwiek z jego elementów będzie miało ten sam kształt. Jeżeli napięcie wejściowe jest sygnałem zespolonym (tj. jest sumą harmonicznych), to w dowolnym elemencie obwodu liniowego zachowane są wszystkie składowe harmoniczne tego sygnału: innymi słowy kształt napięcia przyłożonego do wejścia jest zachowany. W takim przypadku na wyjściu obwodu liniowego zmieni się tylko stosunek amplitud harmonicznych.
· Obwód liniowy nie przekształca widma sygnału elektrycznego. Może zmieniać składowe widma jedynie pod względem amplitudy i fazy. To jest przyczyną zniekształcenie liniowe .
· Każdy rzeczywisty obwód liniowy zniekształca kształt sygnału z powodu stanów nieustalonych i skończonej szerokości pasma.
Ściśle mówiąc, wszystkie elementy obwodów elektrycznych są nieliniowe. Jednak w pewnym zakresie zmian wielkości zmiennych nieliniowość pierwiastków objawia się na tyle słabo, że można ją praktycznie pominąć. Przykładem jest wzmacniacz częstotliwości radiowej (RFA) odbiornika radiowego, na którego wejście doprowadzany jest sygnał z anteny o bardzo małej amplitudzie.
Nieliniowość charakterystyki wejściowej tranzystora pierwszego stopnia wzmacniacza RF, w granicach kilku mikrowoltów, jest tak mała, że po prostu nie jest brana pod uwagę.
Zazwyczaj obszar nieliniowego zachowania elementu jest ograniczony, a przejście do nieliniowości może następować stopniowo lub gwałtownie.
Jeżeli na wejście obwodu liniowego zostanie przyłożony sygnał złożony, będący sumą harmonicznych różnych częstotliwości, a obwód liniowy zawiera element zależny od częstotliwości ( L Lub C ), to kształt napięć na jego elementach nie będzie powtarzał kształtu napięcia wejściowego. Wyjaśnia to fakt, że harmoniczne napięcia wejściowego są przesyłane w różny sposób przez taki obwód. W wyniku przejścia sygnału wejściowego przez pojemności i indukcyjności obwodu, zależności pomiędzy składowymi harmonicznymi na elementach obwodu zmieniają się pod względem amplitudy i fazy w stosunku do sygnału wejściowego. W efekcie zależności pomiędzy amplitudami i fazami harmonicznych na wejściu obwodu i na jego wyjściu nie są takie same. Ta właściwość jest podstawą do tworzenia impulsów za pomocą obwodów liniowych.
Nazywa się element, którego parametry zależą od wielkości i polaryzacji przyłożonych napięć lub płynących prądów nieliniowy , a łańcuch zawierający takie elementy nazywa się nieliniowy .
Elementy nieliniowe obejmują elektryczne urządzenia próżniowe (EVD), urządzenia półprzewodnikowe(SPP), pracujące w nieliniowym przekroju charakterystyki prądowo-napięciowej, diody (próżniowe i półprzewodnikowe), a także transformatory z ferromagnesami.
Właściwości obwodów nieliniowych:
· Prąd płynący przez element nieliniowy nie jest proporcjonalny do przyłożonego do niego napięcia, tj. Zależność pomiędzy napięciem i prądem (CV) jest nieliniowa. Przykładem takiej charakterystyki prądowo-napięciowej są charakterystyki wejściowe i wyjściowe EVP i PPP.
· Procesy zachodzące w obwodach nieliniowych opisywane są równaniami nieliniowymi różne typy, których współczynniki zależą od samej funkcji napięcia (prądu) lub od jej pochodnych, a charakterystyka prądowo-napięciowa obwodu nieliniowego ma postać krzywej lub linii przerywanej. Przykładem są charakterystyki diod, triod, tyrystorów, diod Zenera itp.
· W przypadku obwodów nieliniowych zasada superpozycji nie ma zastosowania. Kiedy sygnał zewnętrzny działa na obwody nieliniowe, zawsze powstają w nich prądy zawierające nowe składowe częstotliwości, których nie było w sygnale wejściowym. To jest przyczyną
zniekształcenie nieliniowe , co powoduje, że sygnał wyjściowy jest nieliniowy
obwód zawsze różni się kształtem od sygnału wejściowego.
Różnicowanie łańcuchów
Aby z zadanego kształtu napięcia uzyskać impuls o pożądanym kształcie za pomocą pasywnego obwodu elektrycznego, konieczna jest znajomość właściwości formacyjnych tego obwodu. Właściwości formowania charakteryzują zdolność obwodu liniowego do zmiany kształtu przesyłanego (przetworzonego) sygnału w określony sposób i są całkowicie zdeterminowane rodzajem jego częstotliwości i czasu S charakterystyka x.
W technologii impulsowej do generowania sygnałów powszechnie stosuje się liniowe sieci dwu- i czterozaciskowe.
Różnicowanie to obwód, którego napięcie wyjściowe jest proporcjonalne do pierwszej pochodnej napięcia wejściowego. Matematycznie wyraża się to następującym wzorem:
 ………………………. (2.1),
………………………. (2.1),
Gdzie ty w – napięcie na wejściu obwodu różnicującego;
Wychodzisz– napięcie na wyjściu obwodu różnicującego;
k – współczynnik proporcjonalności.
Obwody różnicujące (DC) służą do różnicowania impulsów wideo. W tym przypadku łańcuchy różniczkujące pozwalają na następujące przekształcenia:
· skracanie prostokątnych impulsów wideo i tworzenie z nich spiczastych impulsów, które służą do wyzwalania i synchronizacji różnych urządzeń impulsowych;
· otrzymywanie pochodnych czasowych funkcji zespolonych. Jest to wykorzystywane w technologii pomiarowej, systemach autoregulacji i automatycznego śledzenia;
· tworzenie impulsów prostokątnych z impulsów piłokształtnych.
Najprostsze obwody różnicujące są pojemnościowe ( RC ) i indukcyjny ( R.L. ) obwody (ryc. 2.1):
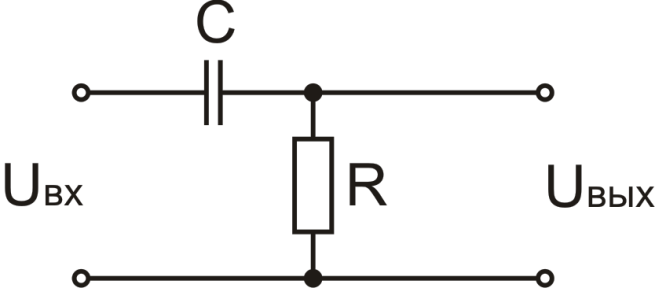

Ryc.2.1. Rodzaje łańcuchów różnicujących:
A) pojemnościowy prąd stały; B) indukcyjny prąd stały
Pokażmy to RC - łańcuch w pewnych warunkach ulega różnicowaniu.
Wiadomo, że prąd płynący przez pojemność określa się za pomocą wyrażenia:
 ........................................... (2.2).
........................................... (2.2).
Jednocześnie z ryc. 2.1, A to oczywiste
 ,
,
ponieważ R I C są dzielnikiem napięcia. Ponieważ napięcie
 , To .
, To .
Napięcie wyjściowe
 ………………….... (2.3).
………………….... (2.3).
Podstawiając wyrażenie (2.2) do (2.3) otrzymujemy:
 ……………… (2.4).
……………… (2.4).
Jeśli wybierzesz wystarczająco małą wartość R tak aby warunek był spełniony
wtedy otrzymujemy przybliżoną równość
 ……………………….. (2.5).
……………………….. (2.5).
Równość ta jest identyczna z (2.1).
Wybierać R wystarczająco mały rozmiar- oznacza to zapewnienie spełnienia nierówności
Gdzie ω in = 2πf in – górna częstotliwość graniczna harmonicznej sygnału wyjściowego, która ma również znaczenie dla kształtu impulsu wyjściowego.
Współczynnik proporcjonalności w wyrażeniu (2.1) k = RC = τ nazywa się stała czasowa łańcuch różnicujący. Im gwałtowniej zmienia się napięcie wejściowe, tym mniejsza wartość τ musi mieć obwód różnicujący, aby napięcie wyjściowe miało kształt zbliżony do pochodnej ty w . Parametr τ = RC ma wymiar czasu. Potwierdzeniem tego może być fakt, że zgodnie z Międzynarodowym Układem Jednostek (SI) jednostką miary oporu elektrycznego jest
 ,
,
oraz jednostka miary pojemności elektrycznej
 .
.
Stąd,

Zasada działania łańcucha różniczkującego.
Schemat ideowy Pojemnościowy obwód różnicujący pokazano na ryc. 2.2, a wykresy napięcia pokazano na ryc. 2.3.
![]()
Ryc.2.2. Schemat ideowy pojemnościowego obwodu różnicującego
Niech na wejście zostanie dostarczony idealny prostokątny impuls, dla którego
τ fa = τ do = 0, A opór wewnętrznyźródło sygnału R ja = 0 .Niech pęd będzie określony wzorem:

- Stan początkowy obwodu (t< t 1).
W oryginalnym stanie ty w = 0; Ty z = 0; Jest = 0; Wychodzisz = 0.
- Pierwszy skok napięcia (t = t 1).
W chwili t = t 1 na wejście prądu stałego następuje skok napięcia
Uin = E. W tej chwili U = 0 , ponieważ W nieskończenie krótkim czasie pojemność nie może zostać naładowana. Ale zgodnie z prawem komutacji prąd płynący przez pojemność może natychmiast wzrosnąć. Dlatego w chwili t = t 1 prąd przepływający przez pojemność będzie równy

Dlatego napięcie na wyjściu obwodu w tym momencie będzie równe

- Ładunek kondensatora (t 1< t < t 2).
Po skoku kondensator zaczyna ładować prądem mającymleje zgodnie z prawem wykładniczym:
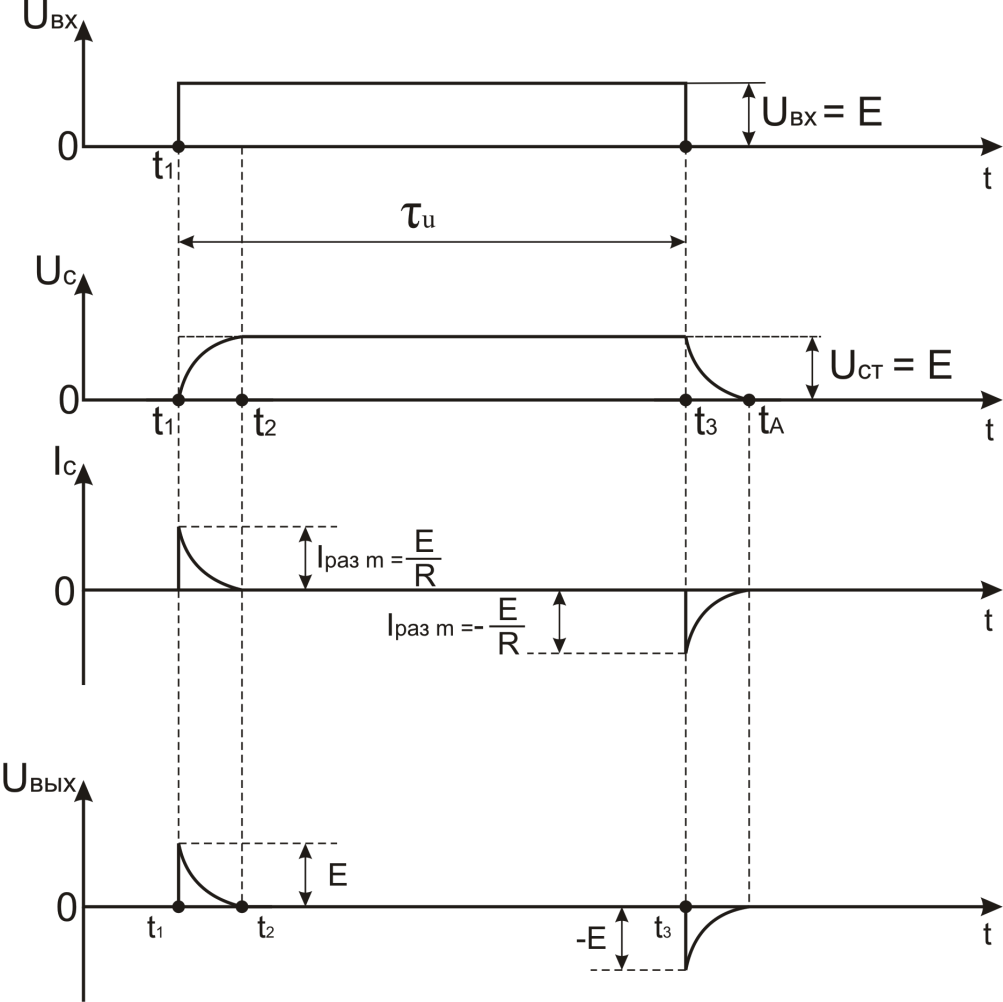
Ryc.2.3. Wykresy naprężeń na elementach obwodu różniczkowego
Napięcie na kondensatorze będzie rosło wykładniczo
 …………………… (2.6).
…………………… (2.6).
Napięcie wyjściowe prądu stałego będzie spadać wraz ze wzrostem napięcia
ładuj kondensator, ponieważ R I C reprezentują dzielnik napięcia:
 …………. (2.7).
…………. (2.7).
Należy pamiętać, że w dowolnym momencie dzielnik napięcia spełnia równość
skąd to wynika
co potwierdza zasadność wyrażenia (2.7).
Teoretycznie ładowanie kondensatora będzie trwało w nieskończoność, ale w praktyce ten przejściowy proces kończy się później
(3…5)τ ładunek
= (3…5)RC
. 
- Koniec ładowania kondensatora (t = t 2).
Po zakończeniu procesu przejścia prąd ładowania kondensatora staje się zerowy. Dlatego napięcie na wyjściu obwodu różnicującego

osiąga wartość niemal zerową, tj. w chwili t = t 2

- Stan ustalony (t 2< t < t 3).
Naraz 


- Drugi skok napięcia (t = t 3).
W pewnym momencie t = t 3
napięcie na wejściu obwodu różnicującego spada gwałtownie do zera. Kondensator C
staje się źródłem napięcia, ponieważ jest naliczany do wartości  .
.
Ponieważ zgodnie z prawem komutacji napięcie na kondensatorze nie może się gwałtownie zmienić, a prąd przepływający przez pojemność może się gwałtownie zmienić, to w tej chwili t = t 3 Napięcie wyjściowe gwałtownie spada do – mi . W takim przypadku prąd rozładowania w danym czasie staje się maksymalny:
 ,
,
i napięcie na wyjściu obwodu różnicującego
 .
.
Napięcie wyjściowe ma znak minus, ponieważ prąd zmienił kierunek.
- Rozładowanie kondensatora (t 3< t < t 4).
Po drugim skoku napięcie na kondensatorze zaczyna spadać zgodnie z prawem wykładniczym:
 ;
;  ;
; 
- Koniec rozładowania kondensatora i przywrócenie stanu początkowego obwodu(t≥ t4).
Po zakończeniu przejściowego procesu rozładowania kondensatora

W ten sposób obwód powrócił do pierwotnego stanu. Koniec rozładowania kondensatora następuje prawie przy t = (3…5)τ = (3…5) RC.
Ponieważ wzięliśmy rezystancję wewnętrzną źródła sygnału R ja = 0, wówczas możemy założyć, że stałe czasowe obwodów ładowania i rozładowania kondensatora τ ładunek = τ razy = τ =RC .
W takim idealnym obwodzie amplituda napięcia wyjściowego Wychodzisz m ach nie zależy od wartości parametrów obwodu R I C , a czas trwania impulsów wyjściowych jest określony przez wartość stałej czasowej obwodu τ = RC . Jak mniej niż wartość R I C , im szybsze są przejściowe procesy ładowania i rozładowywania końcówki kondensatora, tym krótszy jest impuls na wyjściu obwodu.
Teoretycznie czas trwania impulsu na wyjściu obwodu różnicującego, wyznaczony przez bazę, okazuje się nieskończenie długi, ponieważ napięcie na wyjściu maleje wykładniczo. Dlatego czas trwania impulsu jest określany na pewnym poziomie od podstawy
U 0 = αU na zewnątrz (Rys.2.4):

Ryc.2.4. Określanie czasu trwania impulsu na poziomie U 0 Po
rozróżnianie
Określmy czas trwania zróżnicowanego impulsu na poziomie
U 0 = αU na zewnątrz :
 ………………. (2.8),
………………. (2.8),
Gdzie  I
I  ……………………… (2.9).
……………………… (2.9).
Różnicowaniu zawsze towarzyszy skrócenie czasu trwania impulsu. Oznacza to, że pojemność C musi mieć czas na pełne naładowanie podczas różnicowego impulsu wejściowego prądu. Zatem warunkiem praktycznego różniczkowania w celu skrócenia czasu trwania impulsu jest zależność:
τ i wejście > 5τ = 5RC.
Im mniej τ obwodu, im szybciej ładuje się i rozładowuje kondensator oraz im krótszy jest czas trwania impulsów wyjściowych, tym stają się one bardziej spiczaste, a zatem dokładniejsze różnicowanie. Jednak zmniejsz τ w pewnym stopniu korzystne.
Zmianę kształtu impulsu na wyjściu układu różniczkującego można wyjaśnić z punktu widzenia analizy widmowej.
Każda harmoniczna impulsu wejściowego jest dzielona pomiędzy R I C . Dla harmonicznych niskie częstotliwości, określając szczyt impulsu wejściowego, kondensator reprezentuje duży opór, ponieważ
 >>R
.
>>R
.
Dlatego płaska góra impulsu wejściowego prawie nie jest przekazywana na wyjście.
W przypadku składowych impulsu wejściowego o wysokiej częstotliwości, tworzących jego przód i tył,
 << R
.
<< R
.
Dlatego przód i koniec impulsu wejściowego są przesyłane na wyjście praktycznie bez tłumienia. Rozważania te pozwalają nam zdefiniować łańcuch różnicujący jako filtr górnoprzepustowy .